Comparación de plataformas UAV para fotogrametría
Sistemas de bajo coste VS Sistemas profesionales
1- Introducción
En la actualidad, una de las técnicas más utilizadas para realizar levantamientos topográficos es la fotogrametría aérea. Esta técnica utiliza imágenes aéreas para determinar las propiedades geométricas de los objetos y las situaciones espaciales. Por lo tanto, se obtiene información tridimensional a partir de imágenes bidimensionales.
Es importante tener en cuenta que los drones no son más que las plataformas donde van instalados los sensores que recogen la información (en este caso cámaras para capturar imágenes), y que dependiendo del tipo de trabajo no tienen por qué ser la mejor opción.
Si para las necesidades del trabajo a realizar se determina que la utilización de una plataforma UAV es la mejor opción, hay que tener en cuenta que existe una gran variedad de UAVs en el mercado, y es necesario escoger el sistema más adecuado dependiendo de las necesidades del proyecto.
A causa del gran avance que ha tenido la tecnología drone últimamente, han surgido algunos sistemas para hacer fotogrametría mediante UAV que ofrecen un flujo de trabajo muy simple «pulsando un solo botón´´. Sin embargo, es necesario tener en cuenta la importancia de tener conocimientos sobre fotogrametría para poder utilizar esta técnica, ya que dejar todos los procedimientos y tomas de decisiones en manos de un sistema puede ser arriesgado.
Los sistemas de bajo coste tienen la ventaja de que la inversión inicial para adquirir estos equipos es menor en comparación con los sistemas profesionales. Sin embargo, suelen ser sistemas cerrados que no permiten modificaciones para adaptarlos a los diferentes tipos de trabajos que puedan surgir. En este caso, el mayor limitante de este tipo de equipos es que la cámara esté integrada en el sistema, por lo que no se podría utilizar otra cámara que se pueda adaptar mejor a las necesidades.
2- Objetivo
El objetivo de este artículo es comparar diferentes sistemas UAV para su uso en fotogrametría aérea. Como se ha mencionado, existe una gran variedad de equipos disponibles en el mercado. En este caso se han querido comparar sistemas de bajo coste que ofrecen soluciones completas y de fácil uso con sistemas profesionales pensados específicamente para la realización de fotogrametría aérea.
El objetivo último es comparar el rendimiento que los diferentes equipos nos ofrecen en un vuelo fotogramétrico.
3- Materiales y métodos
3.1- Materiales
Para realizar las pruebas se han utilizado dos UAV de tipo multirrotor con diferentes características. En este caso se ha escogido el modelo Phantom 4 como ejemplo de UAV no diseñado específicamente para fotogrametría aérea y el modelo MAPKER como ejemplo de UAV diseñado específicamente para fotogrametría.
Phantom 4
Como ejemplo de un UAV que ofrece una solución integrada y de fácil uso («fotogrametría pulsando un solo botón´´) se ha escogido uno de los modelos más vendido en el mundo, el Phantom 4 de DJI.
MAPKER
Como ejemplo de un UAV profesional diseñado específicamente para fotogrametría aérea se ha utilizado el modelo MAPKER de Technidrone.
La principal diferencia entre ambos es que el modelo MAPKER permite la integración de diferentes sensores, mientras que el modelo Phantom 4 tiene su propia cámara RGB integrada, por lo que no es posible acoplarle ningún otro sensor. Además de esto, existe una gran diferencia en la autonomía de estos equipos, 25 minutos en el caso del Phantom 4 frente a los 55 del modelo MAPKER.
En la siguiente tabla se resumen las características principales de ambos equipos:

Tabla 1: Tabla comparativa de los UAV.
Como se puede observar, la autonomía es una de las mayores diferencias entre ambos equipos, aun siendo el MAPKER un equipo más pesado que el Phantom 4. Además, el MAPKER es capaz de realizar vuelos con diferentes sensores, lo que ofrece la posibilidad de integrarle cámaras con mejores características que la cámara del Phantom 4. En este caso se le ha instalado la cámara fotográfica Sony Alpha 5000. En la siguiente tabla se muestran las características de esta cámara y de la cámara del Phantom 4.
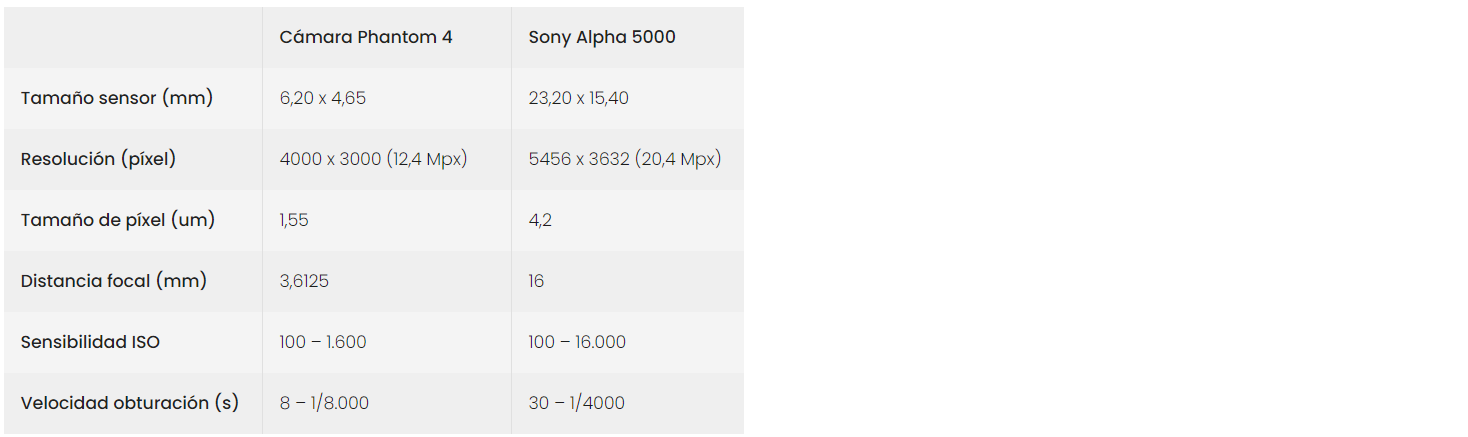
Tabla 2: Tabla comparativa de los sensores.
3.3- Métodos
Para realizar la comparación entre ambos sistemas se han planificado dos misiones, una con cada uno de los equipos y con los sensores mencionados anteriormente.
Uno de los factores más importantes a la hora de planificar un vuelo fotogramétrico es el GSD (Ground Sample Distance), ya que es la resolución espacial (el detalle) de las imágenes que se obtendrán de los vuelos aéreos, es decir, la distancia que corresponde a cada pixel en el terreno. El GSD a obtener en un trabajo depende de las necesidades de este.
Como el objetivo de estas pruebas ha sido comparar sistemas con características diferentes, se han adaptado las alturas de los vuelos respecto al terreno (H) para obtener un GSD similar con ambos sistemas y así poder realizar comparaciones equiparables.
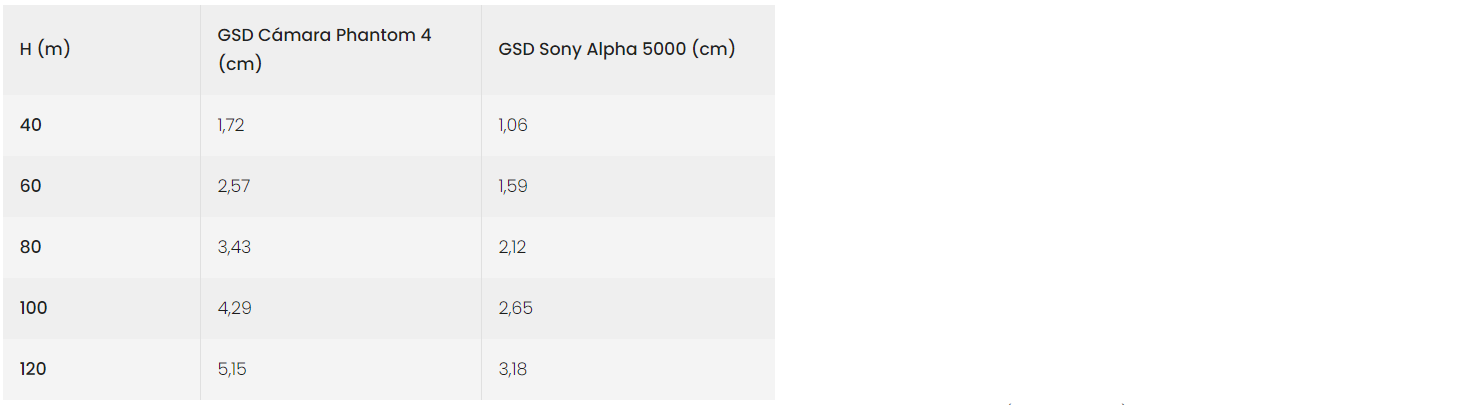
Tabla 3: Comparación de la relación entre altura de vuelo y GSD obtenido con los diferentes sistemas.
Para obtener un GSD similar con ambos equipos se ha planificado el vuelo del Phantom 4 a una altura de 60 metros (GSD: 2,57 cm) y el vuelo del MAPKER a una altura de 100 metros (GSD: 2,65 cm).
Por otra parte, para que ambos vuelos fueran comparables, se han planificado con la misma velocidad de la aeronave y obteniendo los mismos solapes entre imágenes en ambos casos. En este caso los valores utilizados para estos parámetros han sido los siguientes:
Velocidad de la aeronave: 5 m/s
Solape longitudinal: 70%
Solape transversal: 70%
En ambos casos, se ha realizado la planificación tratando de cubrir el mayor área posible en cada uno de los vuelos. Para esto, se ha tenido en cuenta la limitación del tiempo de vuelo de cada aeronave. En la siguiente tabla se muestran los parámetros más determinantes utilizados en cada uno de los vuelos.
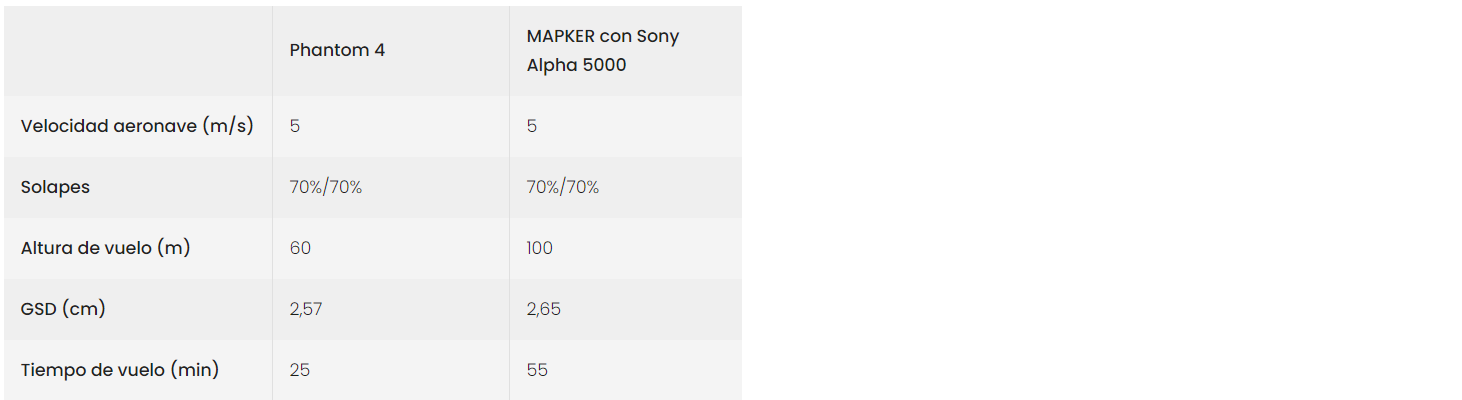
Tabla 4: Tabla comparativa de las planificaciones.
4- Resultados
Utilizando los parámetros de vuelo mencionados, se han planificado las misiones y se han obtenido los siguientes resultados relacionados con el rendimiento de los dos equipos:
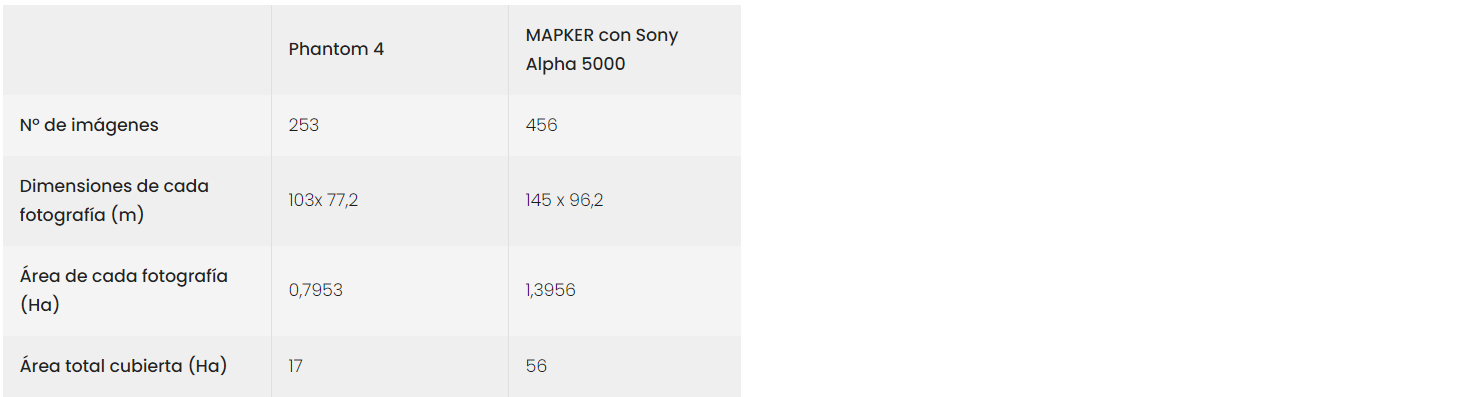
Tabla 5: Tabla comparativa de los resultados.
Como se puede observar en esta tabla, los resultados obtenidos en cuanto a rendimiento se refiere, son mucho mejores utilizando el sistema profesional MAPKER.
En un solo vuelo es posible cubrir un área tres veces mayor utilizando el MAPKER en comparación con el Phantom 4. Por lo tanto, sería necesario realizar tres vuelos con el equipo Phantom 4 para poder cubrir el mismo área que el MAPKER (con la cámara Sony Alpha 5000) es capaz de cubrir en un solo vuelo, teniendo en cuenta que en ambos casos queremos obtener la misma resolución espacial. Esto supondría un aumento de tiempo, ya que para realizar tres vuelos con el Phantom 4 serían necesarios 75 minutos, frente a los 55 del MAPKER. Y eso sin tener en cuenta que entre vuelo y vuelo es necesario aterrizar, despegar, cambiar de batería, comprobar el nuevo plan de vuelo,….
Por otro lado, el volumen de fotografías obtenido para cubrir un mismo área sería superior con el Phantom 4, ya que en tres vuelos sería necesario realizar 768 fotografías frente a las 456 que serían necesarias con el equipo MAPKER para cubrir el mismo área con la misma resolución.
5- Conclusiones
Como se ha mencionado, existen diferencias significativas entre los dos equipos comparados en cuanto a rendimiento se refiere. En este aspecto al MAPKER sale ganando. El ahorro de tiempo de vuelo (trabajo de campo) y de procesado de imágenes (trabajo de oficina), supone un ahorro de tiempo a la hora de realizar un proyecto, lo que se traduce en un ahorro de dinero.
Además, en el equipo MAPKER permite la integración de diferentes sensores, ofreciendo la posibilidad de utilizar otros sensores que pueden aumentar aún más esta diferencia de rendimiento. Eso sin mencionar que es posible integrarle cámaras de otro tipo como multiespectrales o térmicas.
Por lo tanto, los drones de bajo coste pueden ser una opción económica para realizar pequeños trabajos (siempre RGB, por supuesto), pero para trabajos de mayor envergadura o en los que sea necesario integrar diferentes sensores para adaptar el equipo a diferentes proyectos, es necesario acudir a un equipo profesional.